
Summary: This project aimed to address a gap in the tools available for research using the Raven-II surgical robot. The robot lacked a suitable digital twin that could interact with its environment in simulation despite being supported by some common simulators including AMBF (Asynchronous Multibody Framework). In an effort to address this I collaborated with another researcher in the Intelligent Medical Robotics Lab at Mount Holyoke College to develop this. I led the design and implementation of optimized collision meshes and developed the core dual-platform controller as well as the module interfacing with AMBF. The project was published and presented at the International Symposium on Medical Robotics 2024 and code is all available on github, links below.
Problem & Context: The lack of optimized
collision meshes significantly reduced performance in AMBF producing
unpredictable motion and low framerates (~1hz).
My Contributions:
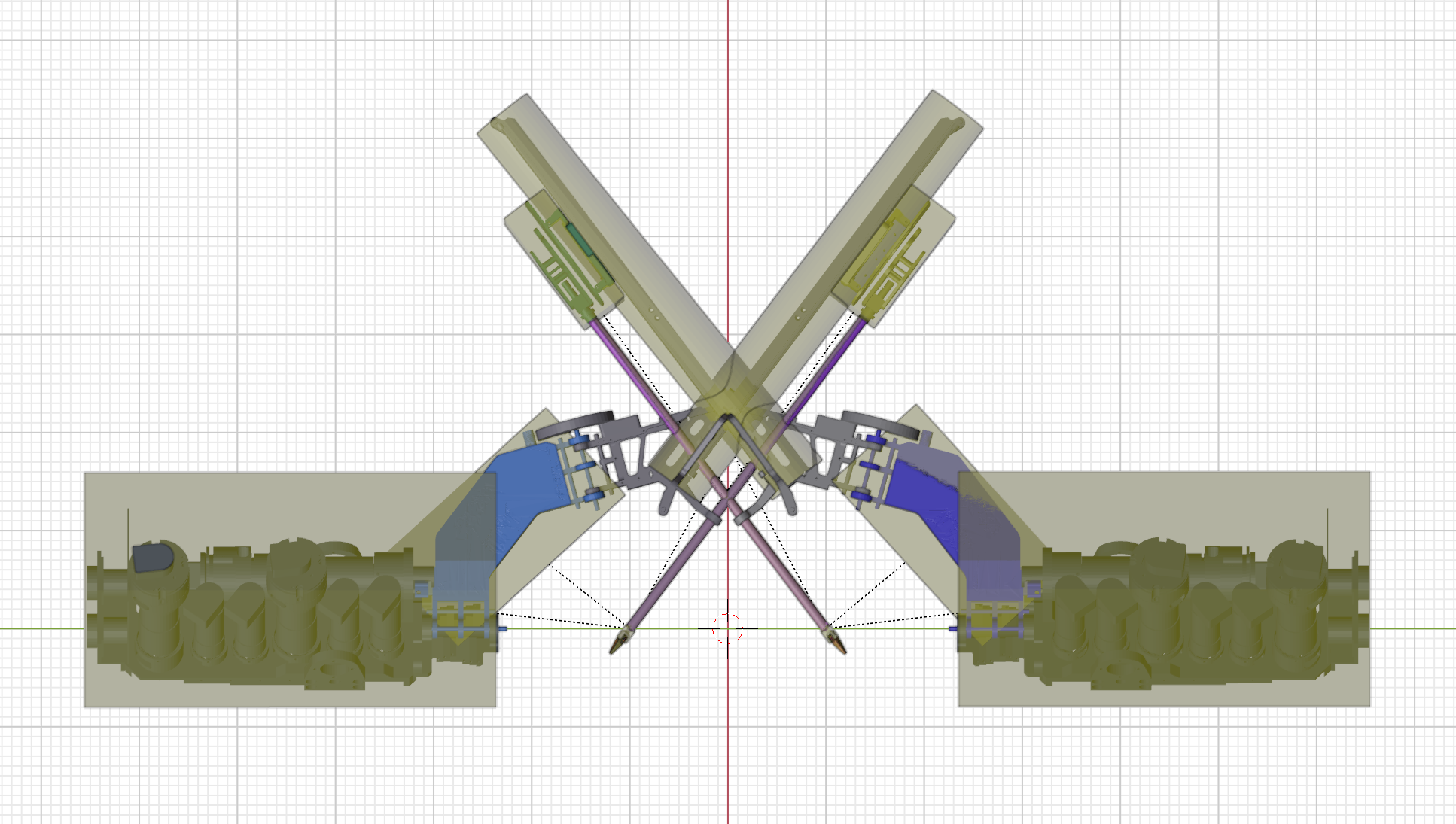
I created simple collision meshes using Blender. Each component was
approximated using primitives for maximum efficiency. The bases of each
arm and links further from the end effector were roughly approximated
using cubes as they rarely interact with environment. The tools were
very closely replicated using cylinders for the shafts and low poly
graspers were modeled with the assistance of Blender's decimate
function to ensure optimal performance while replicating the end
effectors shape as accurately as possible. With the optimized collision
meshes AMBF was capable of running at ~1000hz while interacting with
rigid and soft bodies.
This work enabled reliable real-time sim-to-real experimentation for
surgical robotics research using accessible hardware and open
tools.
Problem & Context: The control softwre for
the Raven-II was not capable of controlling the AMBF simulated Raven-II
and AMBF control software was not capable of controlling the Raven-II.
The lack of a sim-to-real pipeline limited the use of AMBF as a starting
point for research projects.
My Contributions:
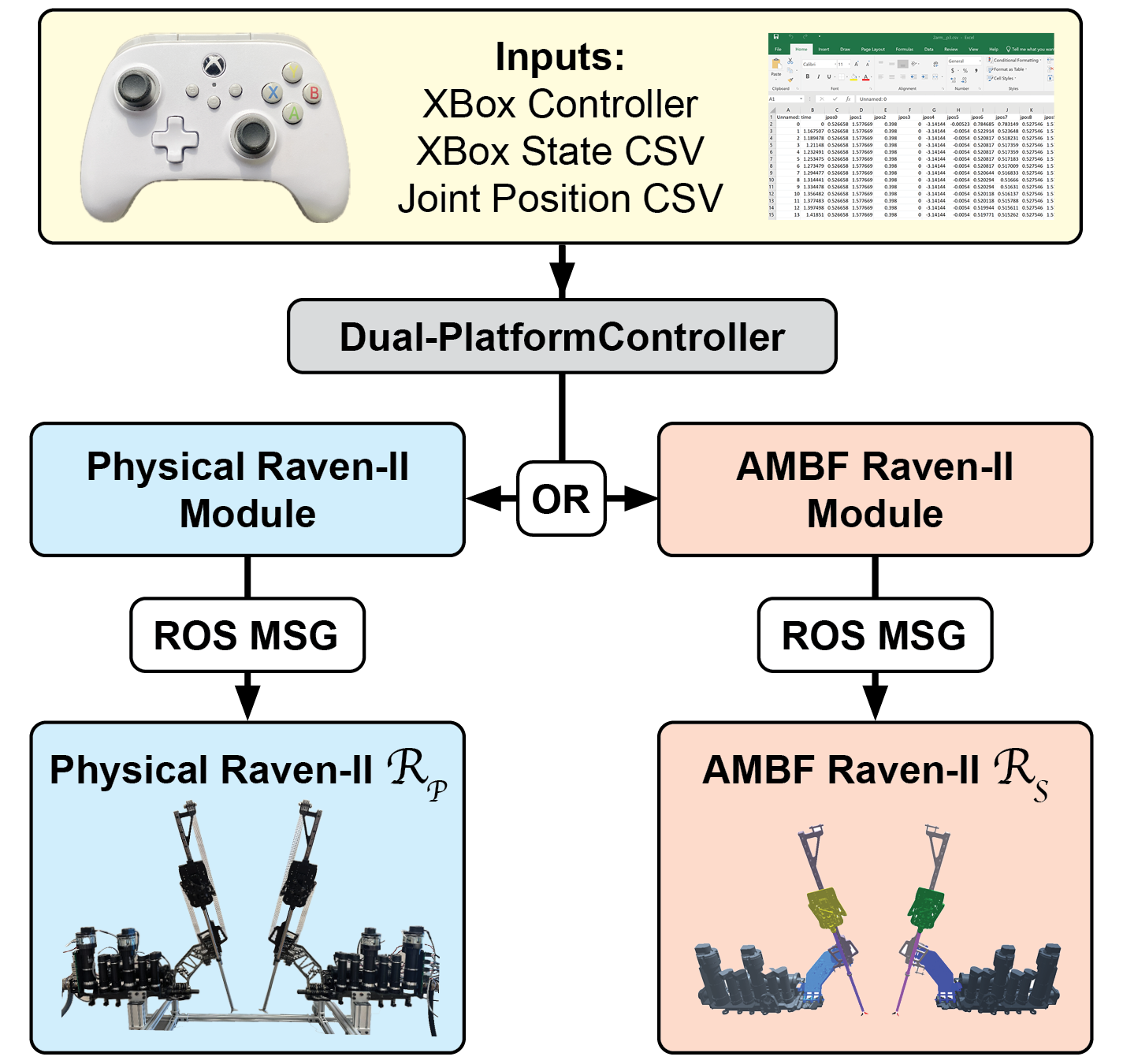
I developed the dual platform control software architecture that
gathered inputs from a gamepad controller and passed them through
Raven-II kinematics then passed them to either the physical or AMBF
Raven-II module. As part of this I developed the control scheme that
allowed the two 7 DOF arms to be controlled with a standard gamepad as
well as modified kinematics that removed 2 DOF from the Raven-II tools
allowing more intuitive control with the gamepad. Additionally, I
refined the AMBF module and tuned the DH parameters to ensure
performance mimicked the physical Raven-II as closely as possible.
This work provided an efficient sim-to-real pipeline making it
significantly easier to enter medical robotics research with a budget
friendly gamepad controller and open source tools.